PID là gì? Bộ điều khiển PID là gì?
PID là một khái niệm quan trọng trong điều khiển tự động, trong bài viết này chúng ta cùng tìm hiểu PID là gì? Bộ điều khiển PID là gì? để có được cách ứng dụng thực tế trong việc điều khiển tự động.
1. PID là gì?
PID là sự tích hợp của 3 bộ điều khiển : tỉ lệ, tích phân và vi phân, có năng lực kiểm soát và điều chỉnh sai số thấp nhất hoàn toàn có thể, tăng vận tốc phân phối, giảm độ vọt lố, hạn chế sự xê dịch. PID nói đúng hơn là một thuật toán được vận dụng vào trong bộ điều khiển để làm thế nào điều khiển đến mức thiết lập nhanh nhất với một sai số thấp nhất .
Bộ điều khiển PID là gì?
Bộ điều khiển PID, còn gọi ngắn gọn là PID là một kỹ thuật điều khiển quá trình tham gia vào các hành động xử lý về “tỉ lệ, tích phân và vi phân”. Nghĩa là các tín hiệu sai số xảy ra sẽ được làm giảm đến mức tối thiểu nhất bởi ảnh hưởng của tác động tỉ lệ, ảnh hưởng của tác động tích phân và được làm rõ bởi một tốc độ đạt được với tác động vi phân số liệu trước đó. Điều khiển PID là một kiểu điều khiển có hồi tiếp vòng kín được sử dụng rộng rải trong hệ thống điện, tự động hóa, điện tử…
Bạn đang đọc: PID là gì? Bộ điều khiển PID là gì?
Ví dụ về PID
Khi bạn muốn điều khiển lò nung, theo như thông thường thì bạn phải setup mức nhiệt độ là 38 °C, khi đạt ngưỡng 38 °C thì ngắt nhiệt. Nhưng theo cách này thì độ đúng chuẩn là 38 °C sẽ thấp vì có sai số lớn. Do đó, khi sử dụng bộ điều khiển PID thì nó sẽ kiểm soát và điều chỉnh giá trị điều khiển ở ngõ ra Ouput sao cho xô lệch giữa giá trị đo được của mạng lưới hệ thống với giá trị setup nhỏ nhất hoàn toàn có thể ( sai số ∼ 0 ), tạo sự không thay đổi và có cung ứng nhanh .
Một cách đơn thuần nhất để hiểu về PID như sau :
- P: là phương pháp điều chỉnh tỉ lệ, giúp tạo ra tín hiệu điều chỉnh tỉ lệ với sai lệch đầu vào theo thời gian lấy mẫu.
- I: là tích phân của sai lệch theo thời gian lấy mẫu. Điều khiển tích phân là phương pháp điều chỉnh để tạo ra các tín hiệu điều chỉnh sao cho độ sai lệch giảm về 0. Từ đó cho ta biết tổng sai số tức thời theo thời gian hay sai số tích lũy trong quá khứ. Khi thời gian càng nhỏ thể hiện tác động điều chỉnh tích phân càng mạnh, tương ứng với độ lệch càng nhỏ.
- D: là vi phân của sai lệch. Điều khiển vi phân tạo ra tín hiệu điều chỉnh sao cho tỉ lệ với tốc độ thay đổi sai lệch đầu vào. Thời gian càng lớn thì phạm vi điều chỉnh vi phân càng mạnh, tương ứng với bộ điều chỉnh đáp ứng với thay đổi đầu vào càng nhanh.
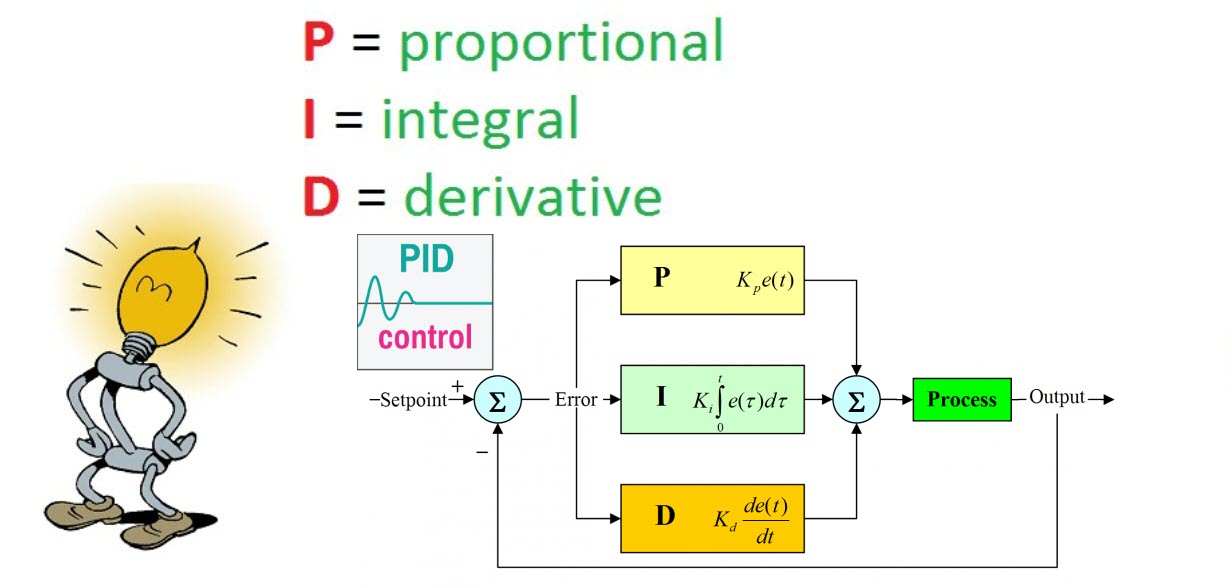
Hình 1 : PID là gì ?
2. Nguyên lý hoạt động của bộ điều khiển PID
Chúng ta có 4 loại điều khiển :
- Bộ điều khiển tỉ lệ – Proportional Controller
- PI viết tắt của Proportional and Integral ( PI ) Controller được gọi là bộ điều khiển tỉ lệ và tích phân
- PD viết tắt của Proportional and Derivative (PD) Controller được gọi là bộ điều khiển đạo hàm
- PID viết tắt của Proportional, Integral, and Derivative (PID) Controller được gọi là bộ điều khiển tỉ lệ, tích phân, đạo hàm
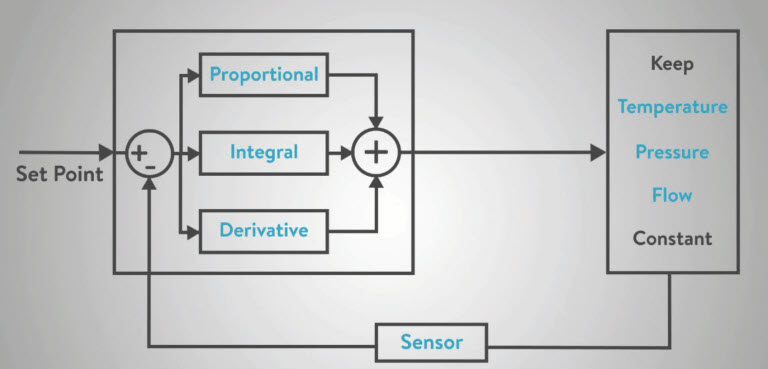
Hình 2 : Nguyên lý hoạt động giải trí bộ điều khiển PID
Hệ thống điều khiển PID tự động hóa gồm có :
Thiết bị điều khiển và thiết lập ( PLC, HMI ). Cơ cấu chấp hành ( thiết bị gia nhiệt ). Thiết bị hồi tiếp ( cảm ứng nhiệt độ, cảm biến áp suất ) .
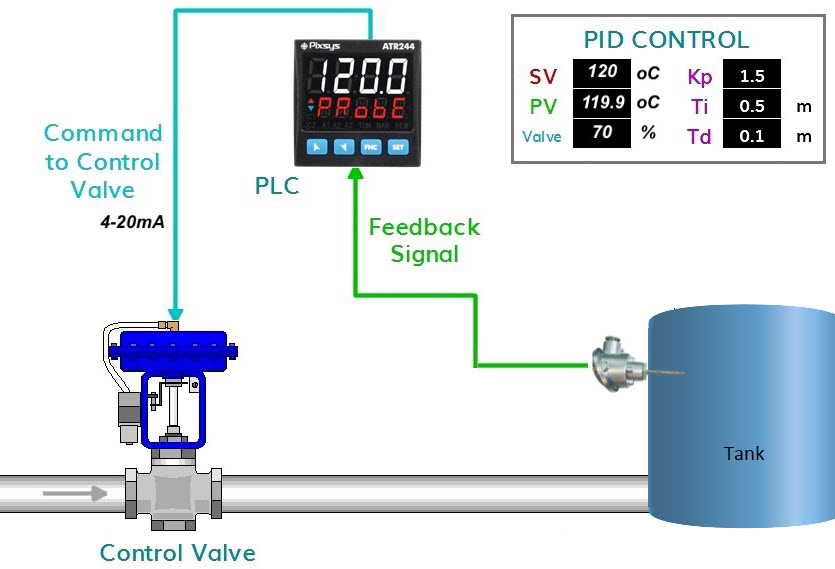
Hình 3 : Bộ điều khiển nhiệt độ PID
Một mạng lưới hệ thống điều khiển nhiệt độ PID bằng PLC với những thiết bị : PLC, cảm ứng đo nhiệt độ và thiết bị gia nhiệt. Các thông số PI – PD – PID được mô phỏng bằng những thuật toán điều khiển trong PLC giúp dể tưởng tượng hơn về điều khiển nhiệt độ PID .
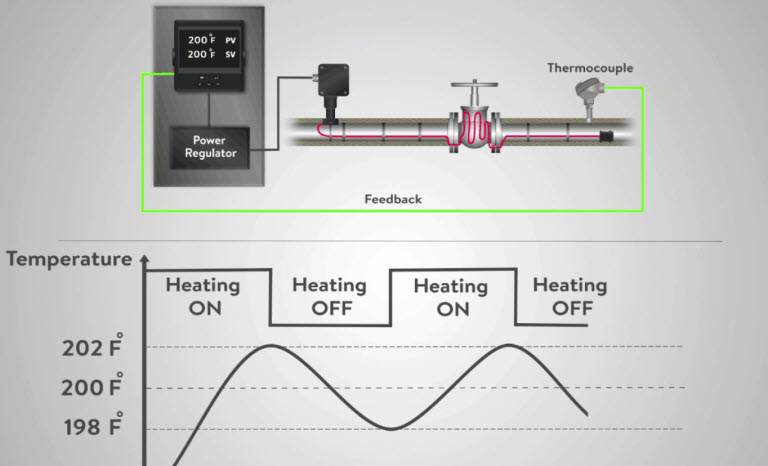
Hình 4 : Cách thức hoạt động giải trí bộ điều khiển PID
Khi chọn giá trị set point hay còn gọi là giá trị setup ( SV ). Bộ điều khiển sẽ gửi đi những thông tin điều khiển tới những thiết bị cơ cấu tổ chức chấp hành .
Quá trình điều khiển này sẽ là một loạt những thuật toán, nhu yếu đóng mở liên tục với thời hạn nhanh hoặc chậm nhờ vào vào mạng lưới hệ thống đang hoạt động giải trí .
Khi nhìn vào biểu đồ điều khiển nhiệt độ tại 200 °F tất cả chúng ta thấy rằng mức ON – OFF sẽ liên tục được đóng – mở tại 198 °F và 202 °F để hòn đảo bảo nhiệt độ luôn giữ tại 200 °F theo thiết lập .
3. Tại sao sử dụng bộ điều khiển PID
PID được coi là là bộ điều khiển lý tưởng của những mạng lưới hệ thống điều khiển quá trình tân tiến. Nó được sử dụng hầu hết trong những ứng dụng điều khiển quy trình tự động hóa trong công nghiệp lúc bấy giờ. Để kiểm soát và điều chỉnh lưu lượng, nhiệt độ, áp suất, vv …
- Giảm sai số xác lập đến mức tối thiểu nhất
- Hạn chế độ dao động
- Giảm thời gian xác lập và độ vọt lố.
3.1. Điều khiển mức nước bằng PID
Để đánh giá được tầm quan trọng của việc sử dụng bộ điều khiển PID chúng ta cần so sánh điều khiển bằng tay và điều khiển tự động. Cùng xem cách điều khiển mức nước bằng cả hai cách truyền thống và PID.
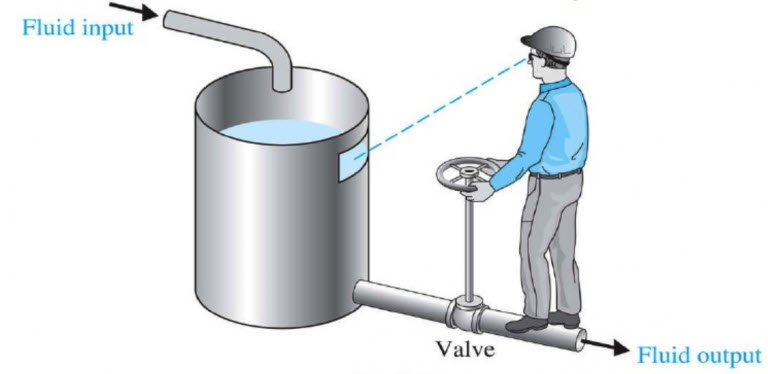
Hình 5 : Điều khiển mức nước bằng tay
Quá trình điều khiển mức nước bằng tay hay còn gọi là thủ công bằng tay có độ đúng mực không cao mà còn là một quy trình buồn chán và tẻ nhạt. Để duy trì mức nước cố định và thắt chặt trong tank khi vừa xả nước vào vừa mở van bên dưới tank ra, người công nhân phải dựa vào mắt để quan sát và kiểm soát và điều chỉnh đóng – mở van sao cho mức nước trong tank luôn ổ một ngưỡng được cho phép .
Ở đây người điều khiển van được gọi là cơ cấu tổ chức chấp hành còn mắt được xem như là thiết bị đo mức nước. Nếu nước xả vào quá nhanh thì đồng nghĩa tương quan van phải mở lớn hơn để bảo vệ nước không bị tràn. Việc này trở nên đơn thuần nếu tất cả chúng ta sử dụng những mạng lưới hệ thống điều khiển PID để điều khiển mức nước. Bộ điều khiển hoàn toàn có thể chạy trọn vẹn tự động hóa mà không cần sự can thiệp của con người, cần có những điều sau đây :
- Bộ điều khiển nhận tín hiệu 4-20mA ngõ ra PID 4-20mA.
- Cảm biến đo mức nước 4-20mA.
- Van điều khiển nước xả ra tín hiệu 4-20mA.
- Mức nước đo được từ cảm biến, được gọi là biến quá trình (PV).
- SV là giá trị cài đặt cần mong nuốn.
==> Khi SV khác với PV thì PID sẽ tự điều chỉnh để duy trì mức nước trong bể một cách chính xác nhất.
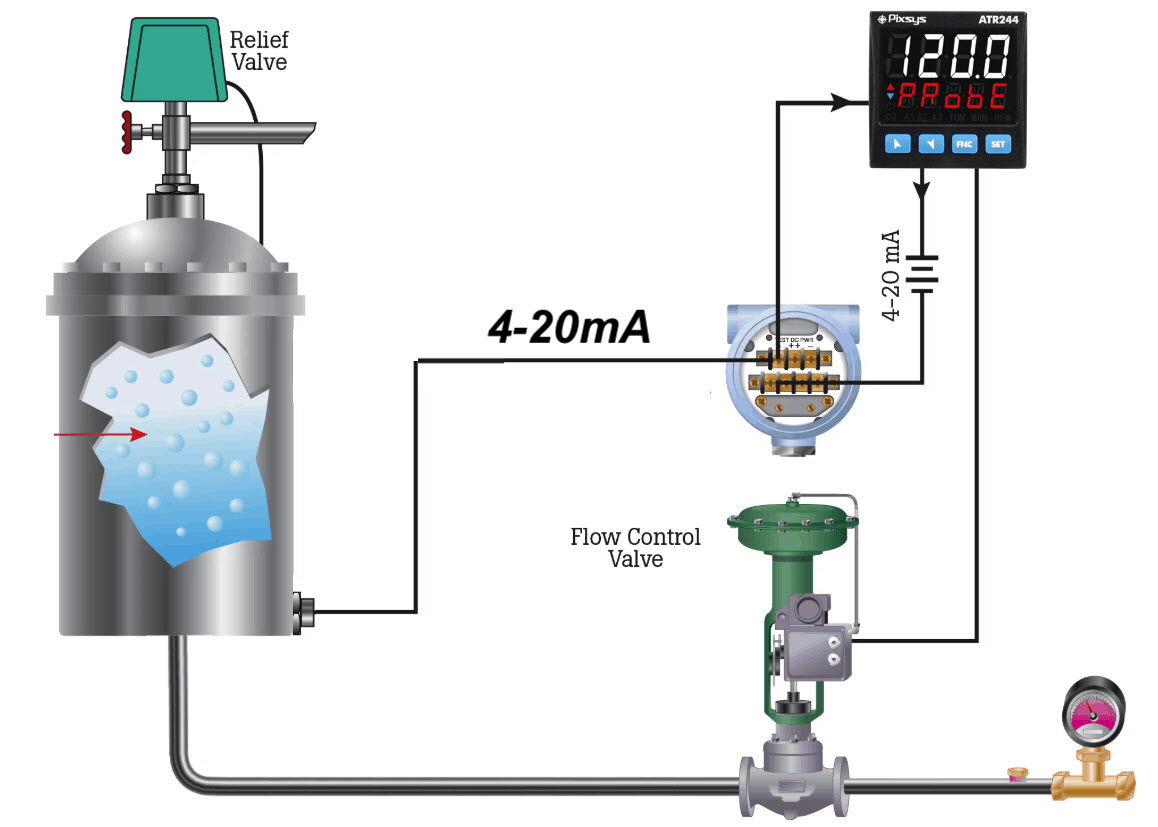
Hình 6 : Bộ điều khiển PID điều khiển mức nước
3.2. PID trong biến tần
Có một bể chứa dung dịch vừa cần trộn đều dung dịch vừa hoàn toàn có thể điều khiển nhiệt độ tại 70 °C. Để điều khiển tự động hóa với PID, cần có sự phối hợp của những thiết bị như sau :
- Van điều khiển lưu lượng
- Cảm biến nhiệt độ
- Biến tần điều khiển PID cho động cơ
- Bộ điều khiển nhiệt độ PID cho van điều khiển
Cảm biến nhiệt độ hoàn toàn có thể điều khiển được vận tốc của biến tần và lưu lượng nước đi qua van điều khiển. Nhằm bảo vệ mức độ trộn đều dung dịch và nhệt độ trong bể. Việc tăng hay giảm nhiệt độ nhờ vào vào lưu lượng dung dịch đi qua van điều khiển. Còn trộn dung dịch đều hay không lại phụ thuộc vào vào biến tần .
Điều khiển tín hiệu PID là một quy trình phức tạp. Để điều khiển đúng chuẩn những đối tượng người tiêu dùng : nhiệt độ, nhiệt độ, chiều dài, mực nước, lưu lượng, áp suất, .. Cần phải phong cách thiết kế từng PID độc lập cho từng đối tượng người tiêu dùng .
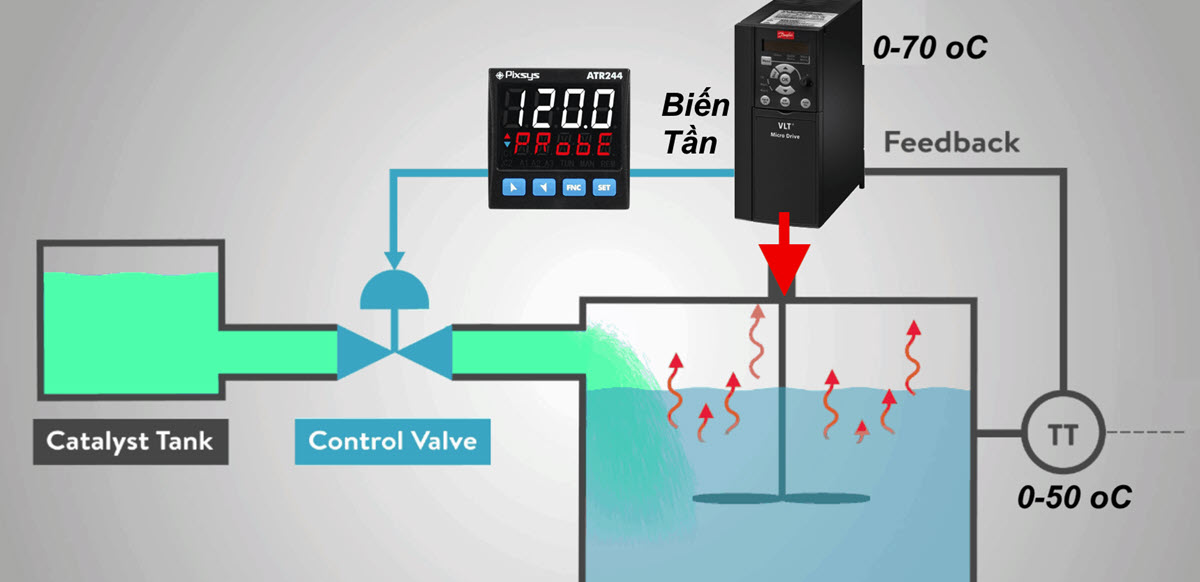
Hình 7 : Điều khiển PID trong biến tần
3.3. Bộ điều khiển PID trong PLC
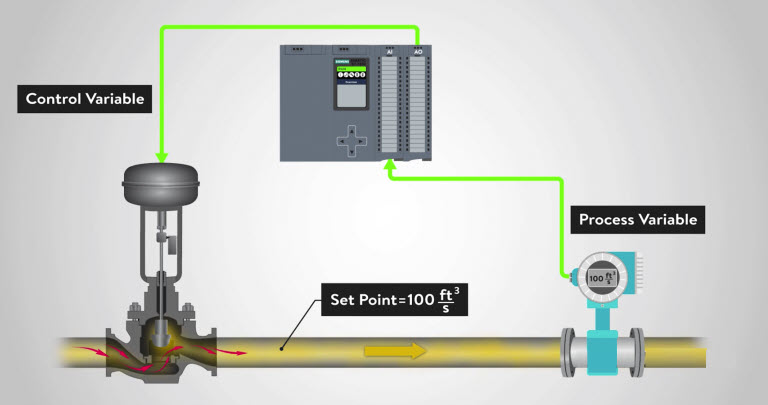
Hình 8 : Bộ điều khiển PID trong PLC
Đối với những mạng lưới hệ thống lớn sử dụng PLC / DCS để điều khiển PID thì không cần dùng tới những bộ điều khiển PID riêng không liên quan gì đến nhau. Trong PLC có sẵn những hàm PID để điều khiển nhiệt độ, áp suất, lưu lượng với tác dụng đúng mực như những bộ điều khiển PID độc lập .
Việc khó khan hơn của PLC chính là tự chọn những thông số kỹ thuật để chạy thực nghiệm để cho ra một thông số PID đúng chuẩn nhất. Trong khi những bộ điều khiển PID 4-20 mA đều có tính năng Auto turning để hoàn toàn có thể tự dò những thông số này với độ đúng mực tới 98 % .
Chỉ cần tất cả chúng ta hiểu những thông số PI – PD – PID thì việc tăng hoặc giảm những giá trị tham số để có hiệu quả như mong ước trở nên đơn thuần .
Như ví dụ :
Van điều khiển nhận tín hiệu điều khiển từ PLC trải qua thiết bị hồi tiếp là đồng hồ đeo tay đo lưu lượng. Khi cần lưu lượng đi qua van là 100 m3 / h thì tất cả chúng ta chỉ cần điều khiển trên màn hình hiển thị HMI liên kết với PLC để truyền tín hiệu xuống van điều khiển .
Lưu lượng tăng hoặc giảm không phụ thuộc vào áp suất trong đường ống hay công suất của bơm nữa mà sẽ được điều khiển theo tín hiệu của đồng hồ đo lưu lượng truyền về.
Như vậy việc điều khiển lưu lượng trở nên đúng mực hơn mà không nhờ vào vào hiệu suất bơm hay áp suất đường ống khi có sự rẽ nhánh của lưu lượng .
Tác giả

Đặng Chung Kiên
Mình là Kiên, là chuyên viên trong nghành nghề dịch vụ IT, điều khiển tự động hóa, giải quyết và xử lý nước, với sở trường thích nghi giao lưu, san sẻ kỹ năng và kiến thức, mình ở đây để cùng học hỏi, tương hỗ những bạn
Kết nối với mình trên mạng xã hội
Source: https://dichvubachkhoa.vn
Category : Linh Kiện Và Vật Tư











