Các phương pháp khởi động và điều chỉnh tốc độ động cơ không đồng bộ 3 pha
Contents
- 1. Khởi động động cơ rotor lồng sóc
1. Khởi động động cơ rotor lồng sóc
1.1. Khởi động trục tiếp
Đây là giải pháp mở máy đơn thuần .
Dùng trong trường hợp hiệu suất của nguồn phân phối lớn hơn nhiều so với hiệu suất của động cơ hoặc mở máy không tải. Lúc mới đóng điện dòng mở máy lớn, vận tốc động cơ tăng dần thì dòng mở máy giảm xuống. Khi vận tốc không thay đổi thì dòng điện ở lại trị số thông thường .
 Hình 1. Phương pháp khởi động trực tiếp
Hình 1. Phương pháp khởi động trực tiếp
1.2. Khởi động bằng cách giảm điện áp ( khởi động gián tiếp qua điện trở, cuộn kháng, biến áp, đổi nối sao – tam giác )
1.2.1. Dùng cuộn kháng nối với mạch điện stator
Mở máy : đóng K1, động cơ được khởi động qua cuộn kháng. Khi mở máy xong đóng K2, điện kháng bị nối ngắn mạch, dòng mở máy giảm k lần, Mmm giảm k2 lần .

1.2.2. Dùng biến áp tự ngẫu
– Dòng mở máy giảm k2 lần, Mmm giảm k2 lần .
– Thứ tự đóng mạch biến áp :
- Đóng K1để nối sao những cuộn máy biến áp .
- Thay đổi vị trí con chạy để cho lúc mở máy điện áp đặt vào động cơ nhỏ sau đó tăng dần lên ( 70-80 ) %. Uđm.
- Sau khi động cơ quay không thay đổi, ngắt K1đóng K2đưa Uđmvào động cơ .
 Hình 3. Phương pháp khởi động dùng máy biến áp tự ngẫu
Hình 3. Phương pháp khởi động dùng máy biến áp tự ngẫu
1.2.3. Dùng chiêu thức đổi nối Y –Δ
Phương pháp này chỉ dùng cho động cơ khi làm việc bình thường, dây quấn stator đấu
hình Δ, điện áp pha bằng điện áp dây của lưới.
- Zf : tổng trở pha.
- U1: điện áp của lưới điện.
 Vậy: dòng giảm đi 3 lần, áp giảm √3, Mmm giảm (√3)2 = 3 lần.
Vậy: dòng giảm đi 3 lần, áp giảm √3, Mmm giảm (√3)2 = 3 lần.
Đây là phương pháp đơn giản nên được dùng nhiều.
 Hình 4. Khởi động theo phương pháp đổi nối Y-Δ
Hình 4. Khởi động theo phương pháp đổi nối Y-Δ
2. Khởi động động cơ rotor dây quấn
Giảm Imm nhưng Mmm tăng lên. Đó là ưu điểm lớn của động cơ rotor dây quấn so với rotor lồng sóc.
Vì vậy những tải cần moment mở máy lớn thì dùng động cơ rotor đây quấn.
 Hình 5. Khởi động động cơ roto dây quấn bằng điện trở
Hình 5. Khởi động động cơ roto dây quấn bằng điện trở
3. Tốc độ quay của động cơ không đồng bộ 3 pha

4. Các phương pháp điều chỉnh tốc độ động cơ không đồng bộ 3 pha
4.1
Thay đổi số cực từ (Multi Speed Three Phase Induction Motor)
Xem thêm: Top 16 linh kiện lâm music hay nhất 2022 – Ngày hội bia Hà Nội – https://dichvubachkhoa.vn
Xem thêm: Top 16 linh kiện lâm music hay nhất 2022 – Ngày hội bia Hà Nội – https://dichvubachkhoa.vn
Trên rãnh stator đặt nhiều bộ dây có số đôi cực khác nhau ( độc lập ) bộ này thao tác thì bộ kia hở mạch .
Chế tạo một bộ dây có 2 vận tốc ( đổi nối những đầu dây ) tỉ số biến tốc là 2 : 1 .
Động cơ không đồng nhất muốn tạo ra moment quay trên rotor thì số cực của rotor và của stator phải bằng nhau. Vậy khi biến hóa p ở trên stator ta phải biến hóa p trên rotor. Điều này khó thực thi so với động cơ rotor dây quấn. Ơ động cơ không đồng điệu rotor lồng sóc có năng lực đặc biệt quan trọng khi cuộn stator chưa đóng điện áp vào thì rotor là khối lồng sóc chưa cực nhưng khi cuộn stator được đóng U và tạo ra dòng điện thì cuộn rotor sẽ tự động hình thành số đôi cực trọn vẹn phù hợp số đôi cực stator .
Tùy theo đặc thù của tải mà chọn kiểu đấu cho tương thích :
- Tải nâng hạ hàng phải đấu kiểu : M = const .
- Máy công cụ thì đấu kiểu : P = const .
- Động cơ bơm, quạt gió, chân vịt tàu thủy …. M, P ≠const .
 Hình 6. Thay đổi số cực của động cơ bằng cách đổi nối các đầu dây
Hình 6. Thay đổi số cực của động cơ bằng cách đổi nối các đầu dây
4.2. Thay đổi tần số
Tốc độ của động cơ KĐB :
 Khi hệ số trượt thay đổi ít thì tốc độ tỷ lệ thuận với tần số.
Khi hệ số trượt thay đổi ít thì tốc độ tỷ lệ thuận với tần số.
Mặt khác, từ biểu thức: E1 = 4.44f1W1KdqØmax ta nhận thấy max tỷ lệ thuận với E1/f1.
Chúng ta mong muốn giữ cho Ømax= const?
Muốn vậy phải điều chỉnh đồng thời cả E / f, có nghĩa là phải sử dụng một nguồn điện đặc biệt quan trọng, đó là những cỗ máy biến tần công nghiệp .
Do sự tăng trưởng can đảm và mạnh mẽ của kỹ thuật vi điện tử và điện tử hiệu suất, những cỗ máy biến tần sinh ra đã mở ra một triển vọng lớn trong nghành nghề dịch vụ tinh chỉnh và điều khiển động cơ xoay chiều bằng chiêu thức tần số. Sử dụng biến tần để điều khiển và tinh chỉnh động cơ theo những quy luật khác nhau ( quy luật U / f, tinh chỉnh và điều khiển véc tơ .. ) đã tạo ra những hệ điều khiển và tinh chỉnh vận tốc motor – động cơ điện có những tính năng tiêu biểu vượt trội .
Nguyên lý hoạt động giải trí của bộ biến tần :
-
Lưới nguồn xoay chiều 50Hz (1 pha hay 3 pha) được chỉnh lưu, san phẳng, sau đó
được tách thành 2: biến tần số và điện áp 3 kiểu biến tần. -
Bộ dao động dùng nguồn dòng (CSI). Động cơ vận hành êm, không sử dụng cho
nhiều động cơ đấu song song. -
Bộ điều biên xung (PAM). Cho nhiều động cơ đấu song song, nhưng gây ồn. Bộ
điều rộng xung (PWM)
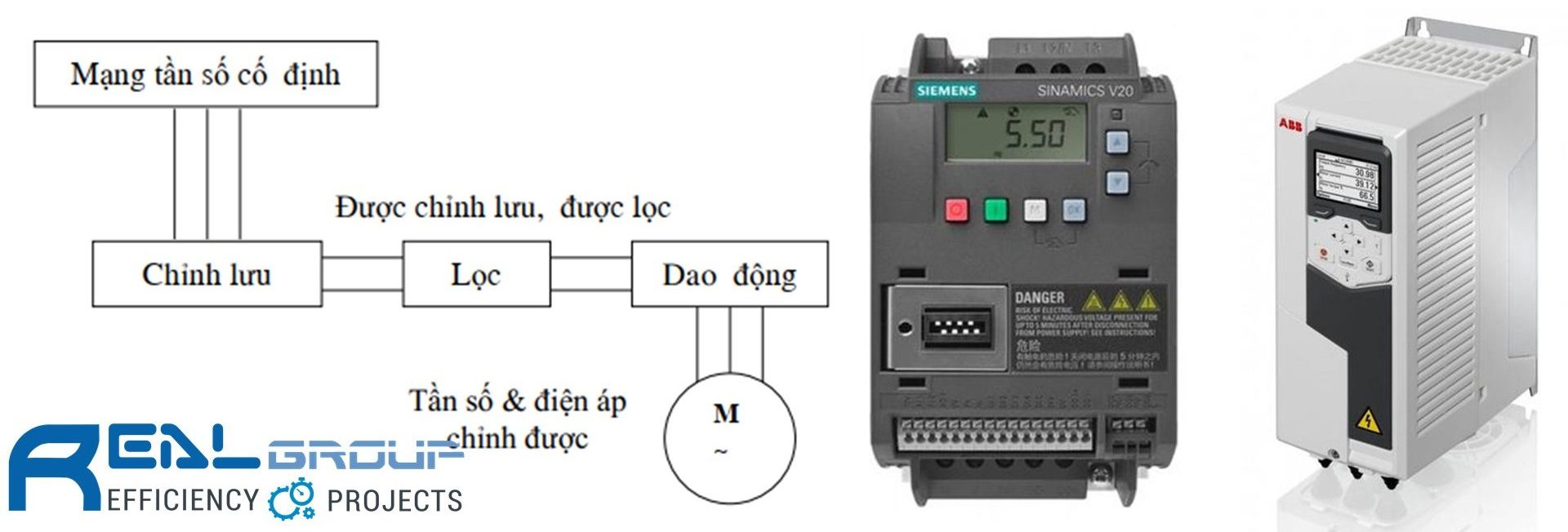 Hình 7. Biến tần
Hình 7. Biến tần
4.3. Phương pháp biến hóa điện áp
Điện áp giảm k lần thì M giảm k2 lần. Nếu Mtải không đổi thì vận tốc giảm, thông số trượt tăng từ sa → sb → sc .
Do moment giảm nhiều nên giảm rõ ràng năng lực quá tải của động cơ, nếu điện áp thấp đến mức moment lớn nhất thấp hơn moment phụ tải → động cơ không quay .
Ngày nay người ta dùng bộ chỉnh nấc điện áp (dùng Thyristor) để thay đổi điện áp nguồn nuôi cho động cơ.
 Hình 8. Đặc tính cơ khi thay đổi điện áp
Hình 8. Đặc tính cơ khi thay đổi điện áp
 Hình 9. Bộ thay đổi điện áp
Hình 9. Bộ thay đổi điện áp
4.4. Phương pháp thay đổi điện trở phụ trên mạch rotor

 Hình 10. Phương pháp thay đổi điện trở phụ trên mạch Rotor
Hình 10. Phương pháp thay đổi điện trở phụ trên mạch Rotor
Source: https://dichvubachkhoa.vn
Category : Linh Kiện Và Vật Tư
Có thể bạn quan tâm
- 16 Dụng Cụ Trước Khi Dán Giấy Dán Tường
- Top 16 linh kiện lâm music hay nhất 2024 – Ngày hội bia Hà Nội
- Mua linh kiện điện thoại giá sỉ ở đâu Quận 7 – Phát Lộc
- Màn hình iPhone X – Zin New – Chính hãng – Giá rẻ Tín Thành
- GIỚI THIỆU VỀ LINH KIỆN ĐIỆN TỬ TUHU
- Các loại linh kiện chất lượng có trong máy hàn điện tử Pejo. –











